

初始化参考
安装参考:https://blog.csdn.net/qq_21843433/article/details/119255360
各个nx版本镜像下载: https://developer.nvidia.com/embedded/jetpack-archive
pytorch下载安装地址: https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048
英伟达嵌入式GPU jetson NX软件安装说明
| 版本 | 作者 | 更新时间 |
|---|---|---|
| V 1.0 | linyq | 2023-04-03 |
一、jetson NX 烧录操作系统
参考官网介绍:https://developer.nvidia.com/embedded/learn/get-started-jetson-nano-devkit#intro
1.1 硬件准备:
- Jetson NX
- Windows 电脑
- 32G以上空间的 TF存储卡(我用的128G后续软件消耗多)
- TF读卡器
1.2 下载OS镜像:
1.3 格式化TF存储卡
-
Windows安装 SD Memory Card Formatter for Windows

-
选择TF卡盘符(图中是E:\)
-
选择Quick format
-
点击
Format开始格式化 -
耗时10分钟左右
1.4 写入镜像
-
Windows安装Etcher
-
点击
select image选择镜像,选择jetson-nano-jp461-sd-card-image.zip -
点击
selct drive选择TF卡 -
点击
Flash写入
1.5 初始化OS
- 插上键盘、鼠标、TF卡
- 插上网线(nano不带无线网卡,且不建议用USB网卡,不稳定)
- 插上电
- 设置好用户名密码
二、Windows远程控制jetson nx
2.1 准备工作
- Windows安装
putty远程SSH远程命令工具、winSCP远程文件传输工具、VNC远程控制工具,(附件位置:jetson软件安装/2.远程控制工具/) - 使用
putty登录Jetson NX,换源:
版本检查命令行
驱动版本:head -n 1 /etc/nv_tegra_release
内核版本:uname -r
操作系统:lsb_release -i -r
CUDA版本:nvcc -V
cuDNN版本:dpkg -l libcudnn8
opencv版本:dpkg -l libopencv
Tensorrt版本:dpkg -l tensorrt
# 首先备份好原来的source.list文件
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
# 修改source.list,更换清华源
sudo vim /etc/apt/sources.list
# 按dG删除所有内容,复制下面内容加入
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ focal main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ focal-security main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ focal-updates main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ focal-backports main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ focal main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ focal-security main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ focal-updates main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ focal-backports main multiverse restricted universe
# 保存
# 更新软件列表
sudo apt-get update
sudo apt upgrade
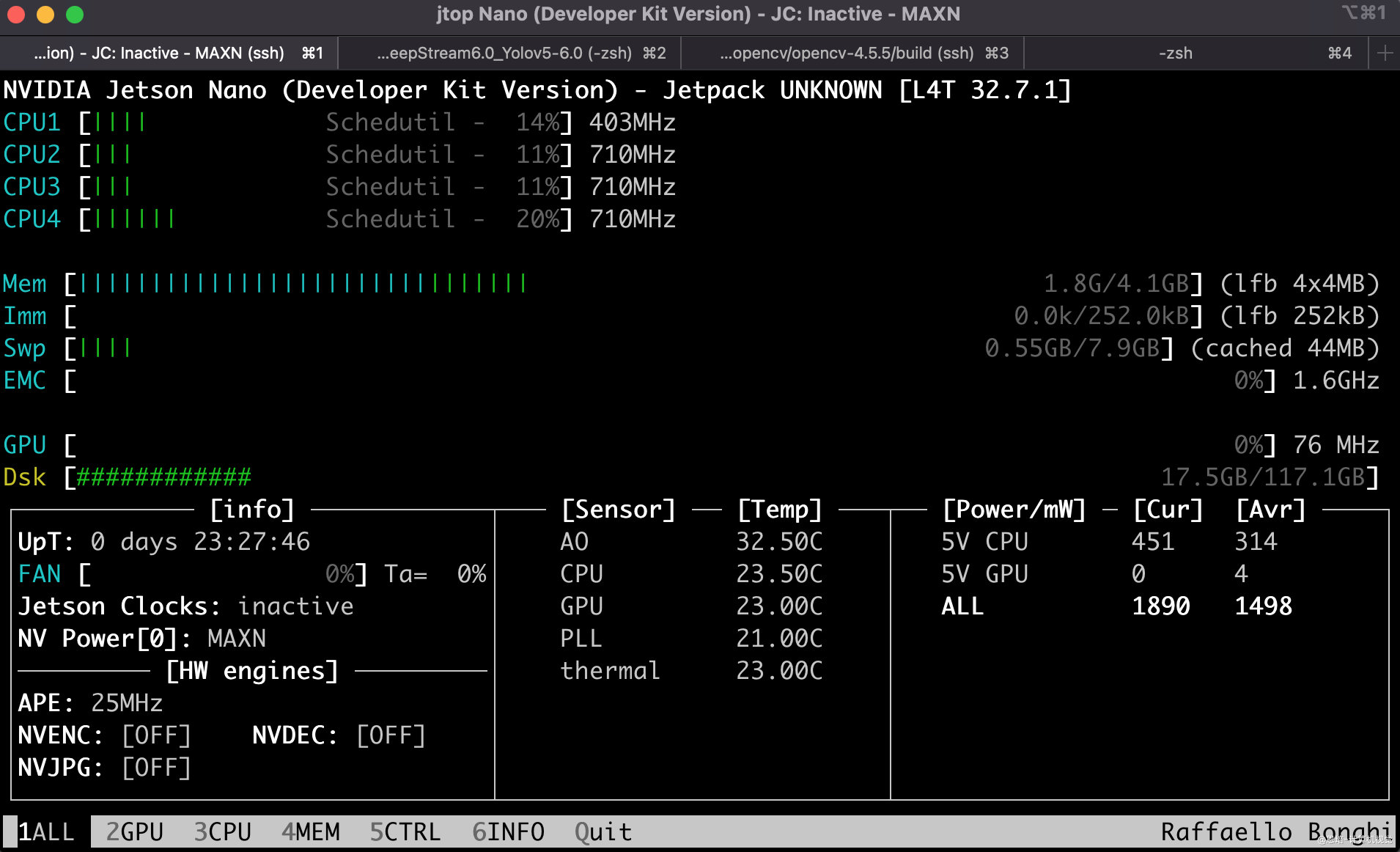
2.2 安装jtop监控
# 安装pip工具
sudo apt install python3-pip python3-dev
python3 -m pip install --upgrade pip
# 安装jtop 换源后安装失败
sudo -H pip3 install -U jetson-stats
# pip换源
执行以下语句
cd ~
mkdir .pip
cd .pip
vi pip.conf
#pip.conf写入
[global]
index-url = https://pypi.tuna.tsinghua.edu.cn/simple/
[install]
trusted-host = pypi.tuna.tsinghua.edu.cn
#保存pip.conf
# 重启
sudo reboot
# 查看jtop,效果如下图
三、jetson nano安装YOLOv5
3.1 准备工作
- jtop 中 power mode选择maxn
- jtop中打开Jetson_clock
- 修改swap(4G后面编译或运行不够)
sudo vim /etc/systemd/nvzramconfig.sh
# 修改
mem=$((("${totalmem}" / 2 / "${NRDEVICES}") * 1024))
# 为
为mem=$((("${totalmem}" * 2 / "${NRDEVICES}") * 1024))
# 重启
sudo reboot
# 再进入输入jtop可以查看是否变化
3.2 安装pytorch+torchvision
如果需要下载其他版本,请进入官网:https://forums.developer.nvidia.com/t/pytorch-for-jetson-version-1-10-now-available/72048
本课使用的是:PyTorch v1.7 - torchvision v0.8.1,离线安装包文件位置:
jetson软件安装/3.pytorch_torchvision
# 进入离线安装包目录
# 安装PyTorch
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev
pip3 install Cython
pip3 install numpy torch-1.7.0-cp36-cp36m-linux_aarch64.whl
# 安装torchvision
sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev
# 解压vision-0.8.1.zip
unzip vision-0.8.1.zip
# 重命名
mv vision-0.8.1 torchvision
# 进入目录
cd torchvision
# 安装
export BUILD_VERSION=0.8.0 # where 0.x.0 is the torchvision version
python3 setup.py install --user
# 验证
>>> import torch
>>> print(torch.__version__)
>>> print('CUDA available: ' + str(torch.cuda.is_available()))
>>> print('cuDNN version: ' + str(torch.backends.cudnn.version()))
>>> a = torch.cuda.FloatTensor(2).zero_()
>>> print('Tensor a = ' + str(a))
>>> b = torch.randn(2).cuda()
>>> print('Tensor b = ' + str(b))
>>> c = a + b
>>> print('Tensor c = ' + str(c))
>>> import torchvision
>>> print(torchvision.__version__)
3.3 安装YOLOv5
# 克隆地址
git clone https://github.com/ultralytics/yolov5.git
# 如果下载速度慢,将附件:
jetson软件安装/5.yolov5相关/yolov5-master.zip
#用winSCP复制到jetson nano上,并解压重命名
# 进入目录
cd yolov5
# 安装依赖
pip3 install -r requirements.txt
# 可能matplotlib 安装出错,将:5.yolov5相关/matplotlib-3.3.3-cp36-cp36m-linux_aarch64.whl 传输到nano,直接离线安装
pip3 install matplotlib-3.3.3-cp36-cp36m-linux_aarch64.whl
# 再检查一遍(之前可能安装中断)
pip3 install -r requirements.txt
# 将训练好的yolov5n.pt传输到yolov5目录下
# 以下指令可以用来测试yolov5
python3 detect.py --source data/images/bus.jpg --weights yolov5n.pt --img 640 #图片测试
python3 detect.py --source video.mp4 --weights yolov5n.pt --img 640 #视频测试,需要自己准备视频
python3 detect.py --source 0 --weights yolov5n.pt --img 640 #摄像头测试
- 报错处理
# 可能报错
ImportError: The _imagingft C module is not installed
# 重新安装pillow
pip3 install 'pillow==8.4.0'
四、jetson nano安装TensorRTX
参考资料:https://github.com/wang-xinyu/tensorrtx/tree/master/yolov5
4.1 选择合适版本的tensorRTX
- 对照YOLOv5版本,选择合适版本的tensorRTX,具体可参考 https://github.com/wang-xinyu/tensorrtx/tree/master/yolov5介绍
- 本课使用YOLOv5 6.0 版,所以需要clone 最新的tensortx:
git clone https://github.com/wang-xinyu/tensorrtx.git,附件位置:jetson软件安装/6.tensorRTX/tensorrtx-master.zip
4.2 修改配置文件
# 在yololayer.h修改检测类别数量、输入画面大小
static constexpr int CLASS_NUM = 80;
static constexpr int INPUT_H = 640;
static constexpr int INPUT_W = 640;
# 在yolov5.cpp 修改数据类型、GPU、NMS、BBox confidence、Batch size
#define USE_FP16 // set USE_INT8 or USE_FP16 or USE_FP32,需要注意jetson nano GPU 不支持int8 型运算,所以这里不需要改动
#define DEVICE 0 // GPU id
#define NMS_THRESH 0.4
#define CONF_THRESH 0.5
#define BATCH_SIZE 1
#define MAX_IMAGE_INPUT_SIZE_THRESH 3000 * 3000 // ensure it exceed the maximum size in the input images !
4.3 编译运行
- 生成
.wts文件
# 将tensorRTX yolov5 下的gen_wts.py复制到ultralytics yolov5目录下(注意不要弄混)
cp {tensorrtx}/yolov5/gen_wts.py {ultralytics}/yolov5
# 进入ultralytics yolov5目录
cd {ultralytics}/yolov5
# 运行,生成
python gen_wts.py -w {.pt 模型文件} -o {.wts 文件}
# 如:
python gen_wts.py -w yolov5n.pt -o yolov5n.wts
# 可以看到目录下有一个文件:
yolov5n.wts
- 编译
# 进入tensorRTX yolov5目录
cd {tensorrtx}/yolov5/
# 确保 yololayer.h 识别类别CLASS_NUM已经修改
mkdir build
cd build
# 复制yolov5n.wts到build目录
cp {ultralytics}/yolov5/yolov5n.wts {tensorrtx}/yolov5/build
cmake ..
make
- 生成engine 文件
sudo ./yolov5 -s [.wts] [.engine] [n/s/m/l/x/n6/s6/m6/l6/x6 or c/c6 gd gw] // serialize model to plan file
# 如
sudo ./yolov5 -s yolov5n.wts yolov5n.engine n
- 测试
sudo ./yolov5 -d [.engine] [image folder] // deserialize and run inference, the images in [image folder] will be processed.
sudo ./yolov5 -d yolov5n.engine ../samples
# 可以查看是否检测出
- 运行python 脚本
python yolo_trt_demo.py(附件位置:jetson软件安装/6.tensorRTX/yolo_trt_demo.py),可能需要安装pycuda
# 安装pycuda
export CPATH=$CPATH:/usr/local/cuda-10.2/targets/aarch64-linux/include
export LIBRARY_PATH=$LIBRARY_PATH:/usr/local/cuda-10.2/targets/aarch64-linux/lib
pip3 install pycuda --user
#或者:
sudo pip3 install --global-option=build_ext --global-option="-I/usr/local/cuda/include" --global-option="-L/usr/local/cuda/lib64" pycuda
五、jetson nano 安装Deepstream(可选)
Deepsream 可以更充分地利用硬件资源,但是他的API(C++、Python)门槛较高,这里流程仅做Demo参考;
5.1 安装Deepstream
# 安装依赖
sudo apt install \
libssl1.0.0 \
libgstreamer1.0-0 \
gstreamer1.0-tools \
gstreamer1.0-plugins-good \
gstreamer1.0-plugins-bad \
gstreamer1.0-plugins-ugly \
gstreamer1.0-libav \
libgstrtspserver-1.0-0 \
libjansson4=2.11-1
#安装librdkafka
git clone https://github.com/edenhill/librdkafka.git
cd librdkafka
git reset --hard 7101c2310341ab3f4675fc565f64f0967e135a6a
./configure
make
sudo make install
# 复制文件
sudo mkdir -p /opt/nvidia/deepstream/deepstream-6.0/lib
sudo cp /usr/local/lib/librdkafka* /opt/nvidia/deepstream/deepstream-6.0/lib
# 下载SDK,并复制到jetson nano上: https://developer.nvidia.com/deepstream_sdk_v6.0.1_jetsontbz2
# 附件位置:/jetson软件安装/7.deepstream/deepstream_sdk_v6.0.1_jetson.tbz2
# 解压DeepStream SDK
sudo tar -xvf deepstream_sdk_v6.0.1_jetson.tbz2 -C /
# 安装
cd /opt/nvidia/deepstream/deepstream-6.0
sudo ./install.sh
sudo ldconfig
5.2 测试yolov3模型
#进入YOLO目录
cd sources/objectDetector_Yolo/
#编译
sudo CUDA_VER=10.2 make -C nvdsinfer_custom_impl_Yolo
#备份
sudo cp prebuild.sh prebuild.sh.back
# 只保留最后两句(下载yolo-tiny权重文件)
sudo vi prebuild.sh
#运行下载
sudo ./prebuild.sh
# 在jetson nano上运行,此时需要连接显示器(通过VNC看不到画面)
cd /opt/nvidia/deepstream/deepstream-6.0/sources/objectDetector_Yolo
# 测试
deepstream-app -c deepstream_app_config_yoloV3_tiny.txt
# 在命令行可以看到帧率
5.3 测试YOLOv5自定义模型
# 进入sources路径
cd /opt/nvidia/deepstream/deepstream-6.0/sources/
# clone YOLOv5 deepstream
git clone https://github.com/enpeizhao/DeepStream6.0_Yolov5-6.0.git
# 附件位置:/jetson软件安装/7.deepstream/DeepStream6.0_Yolov5-6.0-main.zip
# 解压进入目录
cd DeepStream6.0_Yolov5-6.0
#拷贝tensorRTX生成的engine文件(yolov5n.engine)到DeepStream6.0_Yolov5-6.0目录
cp {tensorrtx}/yolov5/build/yolov5n.engine ./
# 编译
sudo CUDA_VER=10.2 make -C nvdsinfer_custom_impl_Yolo
# 修改参数
sudo vi config_infer_primary.txt
num-detected-classes=6 # 改为对应类别
pre-cluster-threshold=0.25 #改变CONF_THRESH
# 修改对应的类别标签
sudo vi labels.txt
# 如果修改 nvdsinfer_custom_impl_Yolo/ 下的文件都需要重新编译
sudo vi yololayer.h
# static constexpr int CLASS_NUM = 6;
#如要改变NMS_THRESH, 编辑文件nvdsinfer_custom_impl_Yolo/nvdsparsebbox_Yolo.cpp并重新编译
#define kNMS_THRESH 0.45
# 重新编译
sudo CUDA_VER=10.2 make -C nvdsinfer_custom_impl_Yolo
# 推理
deepstream-app -c deepstream_app_config.txt
# 使用USB摄像头
deepstream-app -c source1_usb_dec_infer_yolov5.txt

 京公网安备 11010502036488号
京公网安备 11010502036488号