

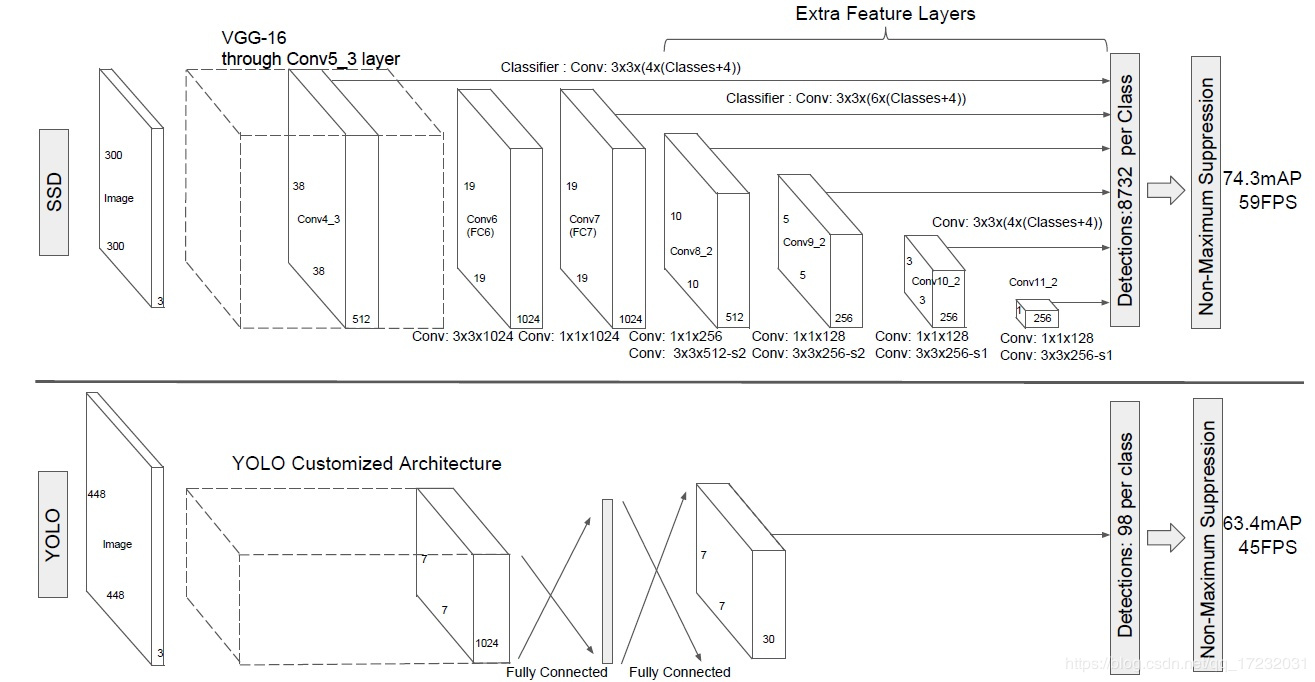
SSD(Single Shot Multibox Detector)是one-stage目标检测算法的典型代表,SSD在速度上表现不错,精度上也不差,是一个非常优秀的算法。
这里,通过SSDPyTorch代码进行分析学习。这篇主要分析SSD的整体网络,有个大致的概念。
一些用到的卷积计算公式:
图像卷积输出大小公式(正常): o=⌊si−k+2p⌋+1.
图像卷积输出大小公式(ceil_mode): o=⌈si−k+2p⌉+1.
图像卷积输出大小公式(带空洞卷积 d): o=⌈si−k+2p−(k−1)∗(d−1)⌉+1.
i为输入图片大小, k为卷积核大小, p为padding大小, s为stride大小, d为(空格数+1)
1. VGG部分 {conv1_2, conv2_2, conv3_3, conv4_3, conv5_3, fc6(conv6), fc7(conv7)}
# 这里给出输入图像的大小(C,H,W)
input_size:(3, 300, 300)
# conv1_2
Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
# 这里给出通过conv_2后图像计算方式和大小, 后面的image_size亦是如此
image_size:(300-2+2*0)/2+1=150 (64, 150, 150)
# conv2_2
Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
image_size:(150-2+2*0)/2+1=75 (128, 75, 75)
# conv3_3
Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=True)
image_size: ceil[(75-2+2*0)/2+1]=38 (256, 38, 38)
# conv4_3
Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))#-->
ReLU(inplace)
MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
image_size:(38-2+2*0)/2+1=19 (512, 19, 19)
# conv5_3
Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
ReLU(inplace)
MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=False)
image_size:(19-3+2*1)/1+1=75 (64, 19, 19)
# conv6,空洞卷积
Conv2d(512, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(6, 6), dilation=(6, 6))
ReLU(inplace)
image_size:(19-3+2*6-(3-1)*(6-1)/1+1=19 (1024, 19, 19)
# conv7
Conv2d(1024, 1024, kernel_size=(1, 1), stride=(1, 1))#-->
ReLU(inplace)
image_size:(19-1+2*0)/1+1=19 (1024, 19, 19)
2. Extra Feature Layers{conv8_2, conv9_2, conv10_2, conv11_2}
input_size:(19,19)
# conv8_2
Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1))
Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1)) #-->
image_size:(19-3+2*1)/2+1=10 (10,10)
# conv9_2
Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1))
Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))#-->
image_size: (10-3+2*1)/2+1=5 (5,5)
# conv10_2
Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1))
Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1))#-->
image_size: (5-3+2*0)/1+1=3 (3,3)
# conv11_2
Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1))
Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1))#-->
image_size: (3-3+2*0)/2+1=1 (1,1)
其中#-->表示连接到detections层,做定位与置信度分类层
3. Loc Layer
Conv2d(512, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
Conv2d(1024, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
Conv2d(512, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
Conv2d(256, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
Conv2d(256, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
Conv2d(256, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
4. Conf Layer
Conv2d(512, 84, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
Conv2d(1024, 126, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
Conv2d(512, 126, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
Conv2d(256, 126, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
Conv2d(256, 84, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
Conv2d(256, 84, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))

 京公网安备 11010502036488号
京公网安备 11010502036488号